
What electronics has been used?
For the Voron there are two electronics options supported by the community, RAMPS plus Raspberry using Klipper as firmware, and the other one is Duet with its expansion (Duex)
I take the Duet by some reasons:
- I knew the board
- Integrated drivers are awesome
- Is very easy to changes thing on the fly without need of compile a new firmware.
What files have you modified to setup the Voron electronics?
Config.g
This is the main setup file for the machine, below this lines we are going to see the modified sections:
Network
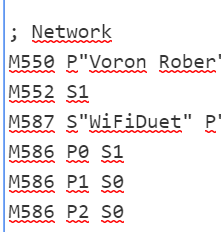
Commands on this section:
- M550 –> To setup the name of the machine
- M552 S1 –> Turn on the Wi-Fi module
- M587 –> Setup Wi-Fi parameters
- The other commands are used for enable http protocol and disable ftp and telnet.
Motors
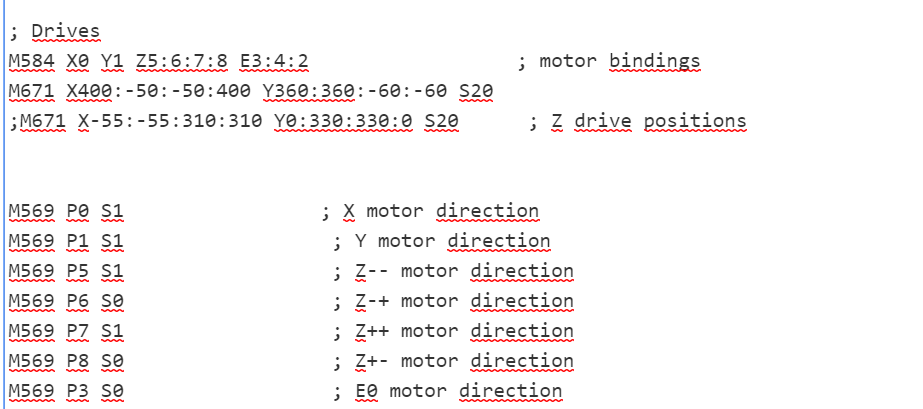
- With M584 command you map the motors with drivers,be careful with Z axis because the next point is very important.
- With M671 you set the coordinates of each motor, is very important for get a good leveling of the gantry later. The coordinates must match with the physical position of the motor, for example, the first Z motor is connected to plug number 5 of the Duex (M584 Z5) and is the motor that is located on coordinates x = 400 and y = 360. The second motor is connected to the plug number 6 of Duex and is physically located on coordinates x = -50 and y = 360.
- Finally with M569 commands the direction of the motors are defined, to choose the correct you must test them carefully

- With M350 command you set the microstepping for the drivers, in my case I set all the movement motors (X, Y and Z) with 256 microsteps without interpolation and the extruder to 256 with interpolation.
- M92 command set the number of steps by mm for each movement (axis and extruder)
- M566 commando sets the jerk
- With M203 syou set the maximum speed of the movements
- With M201 command you set the accelerations
- Finally, with M906 command you set the amperage for each motor, this is the basic setup, because in a further post I will explain how to use macros to change this values on the fly when you print.
Límits
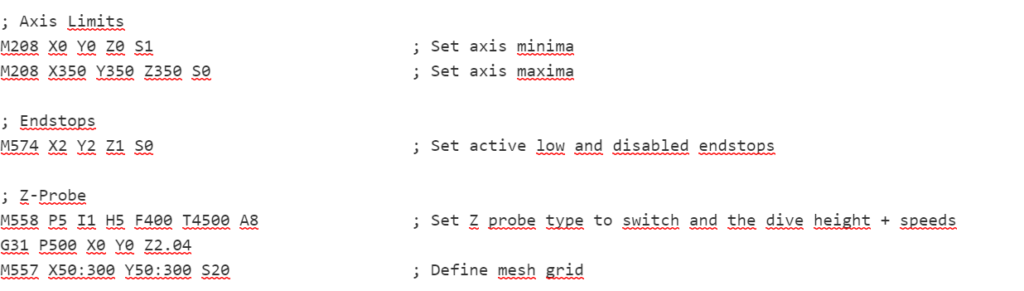
When you made the seup of the limits, you are defining the coordinate system for your printer, in my case, when the printer reach the X and Y endstops, the machine is at the maximum values (350 mm). By other hand when the FSR is touched the Z is at the minimum position
- With M208 commands you set the minimum and maximum limits for each axis.
- With M574 command, I said that when the endstop for X and Y axis are reached, it has the maximum value for these axis (350 mm), on the other hand, when the FSR is touched Z is at minimum value (unless this is not completeley true, as you can see on the next post)
- Finally the inductive probe is set with commands M558 and G31, for this command you must define the Z value that triggered the sensor, but I will explain this on the next post.
Hotend, Heated bed, Fans and Tools
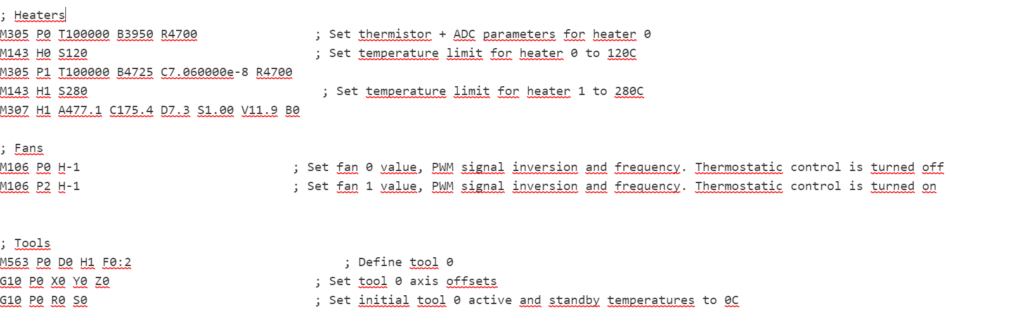
- With M305 commands you set the thermistors for the hotend and the heated bed.
- With M143 you define the maximum temperature for the hotend and the heated bed.
- M307 is used to configure the PID for the hotend.
- You need to setup only the layer fans, because I plug the hotend fan to an always on fan plug. Note that I have connected the layer fans to fan connectors 0 and 2, because the connector 1 is dedicated to a thermostatic controlled fan.
- On the tools section you manage the tool itself, attaching to it the hotend and the layer fans with M563 command.
I think that this is enough for today, and you can see that setup the electronics for the Voron is not an easy task.
On the following posts, I will explain how to setup the Z zero position by modifying hoez,g and homeall.g files, how to create the bed.g file to level the gantry and the macros that I used for printing with the Voron.
Hello. I’m interested in your article because I’m passionate about Voron and I’m very interested in how to make the settings for my Duet 2 wifi + Duex 5. If you can help a little I will be grateful.
will this config work on the bigtree tech octopus pro ?
Hi Bill, I don´t know, because some of the gcode is made only for the Duet firmware, so I think that is not fully compatible.
Thank you for your comment 🙂
any chance you have a config for duet 6hc on a trident ? or any suggestions .
Hi Bill, I´m sorry but I just made the Voron 2.1, I must upgrade the config for new versions of the Duet firmware, and then maybe this can help you a bit.
Try to search some info on the Voron´s Discord channel.
Thank for your comment